BIM and Digital Doubles: How unmanned aerial vehicles bring the future closer
Technology to create digital copies of buildings, structures, entire compounds and industrial areas has existed since the 1970s, but only recently have they become accessible, convenient and widespread. This happened thanks to general advancement in computer technology, in particular with unmanned aerial vehicles and methods of processing aerial photography data.
Building Information Model (BIM) and Digital Double, which is a related term is, as the name suggests, a building or structure information model that can contain a large amount of data and information about the building itself, its components, engineering networks and surrounding infrastructure. Digital double is a more general concept. It provides a connection between the real world and the virtual with a large number of online sensors that collect data from the entire city, which are united by the concept of the “Internet of Things” (IoT). Despite being seemingly impossible, the reality of controlling practically all production processes is already here, and the possibility of controlling cities is too close to be ignored (Deng M., et al., 2021). The first and most important thing needed to create BIMs, and even more so Digital Doubles, is data collection.

Production is constantly being improved, every day more and more houses are appearing, the road network is changing and new communications links are being formed. Even the simples building is undergoing changes. Gathering initial data and constantly keeping them up to date is a real challenge in our dynamic world. Unmanned technology, in particular unmanned aerial vehicles (UAVs) have easily integrated into the existing workflow of creating digital copies, reducing cost and work time thanks to their vigorous development, constantly growing market competition and the availability of the technology (Barrile, et al., 2019; Hamledari, Hesam, et al, 2017).
UAVs are one of the tools used by surveyors, engineers, architects, builders and managers. It’s made up of the device itself and the payload that allows us to receive data to build models. The type of aerial vehicle, quadrocopter or aeroplanes, and the type of payload, photo/video camera or LiDAR, are chosen based on the task and scale of the project. Let’s consider the possible tasks and the technology suitable for them.
BIM of an already constructed building or small construction site
One of the technological solutions in this case may be a small quadrocopter with a photo camera. When discussing the creation of a one-time model that doesn’t need to be updated or be linked to surrounding buildings, then not even a GNSS-receiver will be needed. If this work needs to be done regularly or the building is to be connected later to surrounding infrastructure, then a GNSS receiver and geodetic support will be extremely important for accurate measurements to the centimetre and to ensure the result can be reproduced. In urban or any other space with mobile connection and a permanently active base station, then a Real-Time Kinematic (RTK) solution will be suitable. It will provide the required accuracy and also reduce time spent on aerial photography since no post-production of geodetic data will be needed.

Unlike buildings, building sites need more frequent aerial photography and UAV manoeuvrability is paramount. Changes happen all the time, monitoring needs to be carried out regularly to manage the process, therefor a UAV should have either multiple batteries or be able to be charged quickly and have a large number of charging cycles. Manoeuvrability may be required to capture individual parts of the building in greater details as they may have complex geometry and millimetre-level accuracy may be needed. Moreover, if construction takes place round the clock or data updates are needed once a day, then it can be captured at night using LiDAR. The technology is based on shooting a laser at an object which is then reflected back to a receiver.

BIM of a large building site or industrial area
In this case the area of capturing and monitoring is significantly larger. This means that the UAV’s flying time is increased considerable too, or its batteries should be able to be replaced quickly and easily without disrupting the task at hand. It can also be fitted with a photo camera with a better sensor providing more detail which is needed when the UAV flies at a greater altitude. A high altitude means that flying time can be reduced since at a greater height, more can be captured in one shot.
Digital Double
The fifth case is the most demanding on technological specifications. We’ve examined above what depends on the shooting area. However, creating a basis for a Digital Double also involves creating a high-quality relief map, clear building contours, and a reproducible and highly detailed result. A high-quality relief map can be made using LiDAR, even in forested areas. Since signals are sent to the surface very frequently, there is a high probability that at least a few rays will pass through foliage and be reflected off the ground instead of the vegetation. Clear building contours and high detail levels allow a camera with a large full-frame sensor, high-quality lenses and fixed calibration. As mentioned above, the accuracy and reproducibility of the result can be ensured by having a GNSS receiver on the device with both a Post Processing Kinematic (PPK) and RTK approach.
Data processing and results
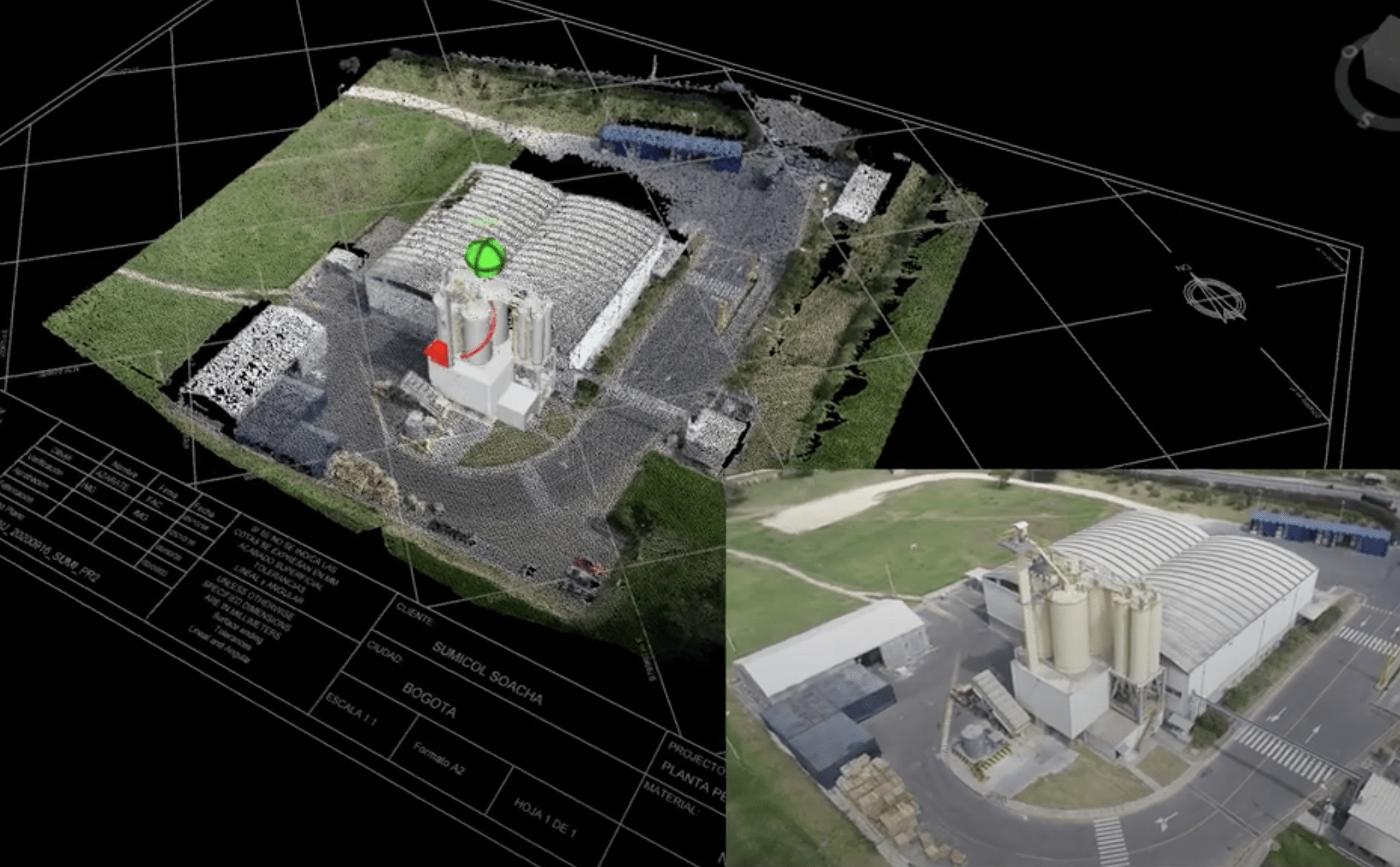
All aerial photography data go through identical processing procedures, no matter the task. Images are processed in a specialised photogrammetric software which finds points appearing in multiple images and connects them together in one space, finding the three-dimensional coordinates in each one. This will then become the basis for the creation of three-dimensional models, digital terrain models (DTM) and orthophotomaps. LiDAR data also goes through some stages of post-production, the most important of which is classifying the received point cloud, after which it will be possible to separate points on the ground from points on vegetation, and both of them from points on buildings. A digital relief model (DRM) can be built on the basis of points on the ground. Unlike a DTM, a DRM only has data on ground height, without vegetation or buildings. DRMs are an important basis for construction, planning and geodetic work.
Three-dimensional models, orthophotmaps and DRMs is the basis for the creation of BIMs and real Digital Doubles. Three-dimensional models give the shape of buildings and DRMs provide a basis for further development of the area. Infrastructure facilities, vegetation and other details of the area can be vectorised from orthophotomaps. The speed at which results are received and their quality has brought planning, monitoring and construction to a new level and has brought the everyday use of Digital Doubles by even ordinary city residents even closer overall.
Applying the received data
Full building and construction and production facility inventory, constant monitoring and security provision, municipal development planning, line and three-dimensional measurements, calculating volumes and much more is accessible using BIMs and Digital Doubles, but first they need to be created. Modern software provides tools for automatic object recognition. For example, clicking on a points cloud shaped like a pipe, a vector object will be created corresponding to the sizes to which additional attributes can be assigned from pre-prepared templates, such as wall thickness, material, purpose etc. Not to mention the simplicity of creating surfaces, walls and rooves, you can also automatically add windows, air ducts and many other objects (https://www.autodesk.com/; https://www.geoweeknews.com/; Garagnani et al., 2012).
There are already examples of both small and larged UAV-based projects being implemented both in many countries. A geoportal created for Tomsk based on three-dimensional modelling is one example of such a project. The entire city was captured by aeroplane drones with geodetic equipment and precision control with identification marks on the ground. Data on individual objects were added on top of the model in the geoportal itself, and vector models of planned objects are also placed there. BIM is more widespread abroad, application methods of BIM and UAV have already been worked out and become widespread, especially in construction and architecture (Hamledari et al, 2018; Rizo-Maestre et al, 2020).
Recommendations
Every technology has its peculiarities and restrictions. Data can be received only in places that UAVs can be located, therefore only external objects are recommended to be created based on aerial photography data. The insides of buildings can be digitised using other tools, such as a ground-based laser scanner. The detail level of received images depends on what camera the device is equipped with and from what height photography took place. However, flying too close to them is also not recommended for safety reasons. Additionally, although the technology is easy to learn, even experienced UAV users should be trained with each new technological solution or UAV model, including in data processing.





BIM for project participants
The application of BIM technology in combination with unmanned solutions is relevant for all participants in the construction process and production.
For developers and investors
- visualisation of building sites before all work begins
- efficient risk management while the investment project is being realised
- monitoring of design projects and construction work in real time
- assessing that the project corresponds with the actual results of construction
- creating digital models for further use, reconstruction or demolishing of buildings and structures.
For designers
- designing with the ability to select the best options
- minimising errors during design stage with high-precision visualisation
- operational adjustments in documentation and attracting several specialists at once
For builders
- visibility of technical solutions and final result of construction
- visualisation of the construction workflow and comparing these data with a time schedule
- linking specific construction tasks to two-dimensional or BIMs
- project adjustment directly on the building site
- design documentation is always up to date.
For managers
- BIM models totally correspond to the building or structure itself and also contains a full set of technical documentation
- timely detection and removal of defects
- full inventory of all production facilities
- instant report creation, instantly receive information about any changes.
Deng, Min, Carol C. Menassa, and Vineet R. Kamat. “From BIM to digital twins: A systematic review of the evolution of intelligent building representations in the AEC-FM industry.” Journal of Information Technology in Construction (ITcon) 26.5 (2021): 58-83.
Barrile, V., et al. “Integration of 3d model from uav survey in bim environment.” International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences (2019).
Hamledari, Hesam, et al. “Evaluation of computer vision-and 4D BIM-based construction progress tracking on a UAV platform.” Proc., 6TH CSCE/ASCE/CRC International Construction Specialty Conference. 2017.
Hamledari, Davari, Sajedi, Zangeneh, McCabe, Fischer (2018), “UAV Mission Planning Using Swarm Intelligence and 4D BIMs in Support of Vision-Based Construction Progress Monitoring and As-built Modeling”, Construction Research Congress 2018, New Orleans, USA.
Rizo-Maestre, C.; González-Avilés, Á.; Galiano-Garrigós, A.; Andújar-Montoya, M.D.; Puchol-García, J.A. UAV + BIM: Incorporation of Photogrammetric Techniques in Architectural Projects with Building Information Modeling Versus Classical Work Processes. Remote Sens. 2020, 12, 2329.
Garagnani, Simone & Mingucci, Roberto & Cinti Luciani, Stefano Collaborative design for existing architecture: the Building Information Modeling as a frontier for coordinated process. 2012