The Phantom 4 RTK Quadcopter with D-RTK 2 GNSS Mobile Station Combo from DJI is a Phantom 4 quadcopter with additional technology that is designed to deliver centimeter-level accurate mapping that can be extremely useful for surveying, construction sites, and inspections. Utilizing an RTK receiver on the top of Phantom 4, and a built-in GNSS module, the Phantom 4 RTK can achieve 1cm+1ppm RTK horizontal and 1.5cm+1ppm RTK vertical positioning accuracy.
In addition to the RTK receiver and GNSS module, the Phantom 4 RTK can achieve such accuracy thanks to DJI’s TimeSync system and the gimbal camera’s calibration process. The camera is the same one that’s on a standard Phantom 4, but with the Phantom 4 RTK, each camera has its radial and tangential lens distortions measured. They are added to the metadata of all captured images, allowing for accurate post-processing that account for the distortions.
The Phantom 4 RTK can perform mapping duties in real-time, but this bundle also includes a separate D-RTK 2 GNSS Mobile Station to help compensate for locations where the Phantom 4 experiences poor or no signal. The Mobile Station can access GPS and GLONASS to provide real-time differential data and can communicate that via OcuSync, 4G, Wi-Fi, or LAN. When mapping, pilots can utilize the Photogrammetry and Waypoint Flight modes in the GS RTK app, which give mapping-specific functionality, such as selecting flight paths and directly loading KML area files. Combine it all and you have an enterprise-level mapping solution that can be used right out of the box.
Mapping Technology
RTK + GNSS for Centimeter Accuracy
The RTK receiver and GNSS module work together to provide flight stability along with centimeter-level mapping accuracy on image metadata. With the Phantom 4 RTK, you can achieve 1cm+1ppm RTK horizontal positioning accuracy, 1.5cm+1ppm RTK vertical positioning accuracy, and 5cm absolute horizontal accuracy of photogrammetric models (when flying at 100m high, 2.7cm GSD, on a sunny day. The RTK receiver can also be connected to the included D-RTK2 Mobile Station, NTRIP (Network Transport of RTCM via Internet Protocol), or it can store its data to be used in PPK (Post Processed Kinematics) after the flight.
TimeSync
The TimeSync system is engineered to help ensure the Phantom 4 RTK’s ability to achieve centimeter-level accuracy. It continually aligns the flight controller, camera, and RTK module, as well as fixing the positioning data to the center of the CMOS. These optimizations give each photo the most accurate metadata possible.
Phantom 4 RTK Controller
The included controller with display is specifically designed for industrial users. It’s pre-loaded with the GS RTK App, includes a microSD card slot, built-in speaker, and hot-swappable batteries. The controller can also connect to the internet for Network RTK with the addition of an (optional) 4G dongle.
GS RTK App
With the Phantom 4 RTK, you get the standard flight modes and abilities of a Phantom 4 quadcopter, plus mapping-specific Photogrammetry and Waypoint Flight modes in the GS RTK app. With these modes, pilots can select a flight plan while adjusting the overlap rate, altitude, speed, camera parameters, and more. Other features include a strong wind alarm, the ability to directly load KML area files for in-office flight planning, and the ability to use the shutter priority mode for keeping the exposure of your images consistent.
OcuSync for Large Site Mapping
The included remote controller with display utilizes DJI’s OcuSync transmission technology to stream HD images and video up to 7 km away. With a strong enough signal, this gives you the opportunity to map large jobsites.
Gimbal Camera with 1″ CMOS Sensor
The onboard camera features a first for the Phantom line: a 1-inch, 20-megapixel CMOS sensor. A custom-engineered lens made up of eight elements is arranged in seven groups. The camera boasts a mechanical aperture that eliminates rolling shutter distortion that can occur when taking images of fast moving subjects or when flying at high speed and a mechanical focus.
1″ CMOS Sensor
Sensor size is often more important to image quality than the number of pixels, because a larger sensor has dynamic range, better signal-to-noise ratio, and boosted low light performance. The 1″ 20MP CMOS sensor in the Phantom 4 RTK is almost four times the size of the Phantom 4’s 1/2.3″ sensor. It uses larger pixels and has a maximum ISO of up to 12,800 as well as increased contrast.
H.264 and H.265 4K Video Recording
Powerful video processing supports H.264 4K videos at 60 fps or H.265 4K at 30 fps, both recorded in a 100 Mbps bitrate. Advanced sensors and processors ensure everything is captured with more image detail and the image data needed for manipulation in post-production.
Production-Optimized 4K
An enhanced video processing system allows video to be captured in cinema- and production- optimized DCI 4K (4096 x 2160) at 60 fps and a bitrate of 100 Mbps. The Phantom 4 RTK also supports the H.265 video codec at 30 fps in 4K resolution. For a given bitrate, H.265 doubles the amount of image processing as H.264, resulting in significantly enhanced image quality from a more efficient compression. Record in the high dynamic range D-log mode to make the most of this image data for color grading.
High-Resolution Lens
كاميرا التصوير للطائرة بدون طيار The Phantom 4 RTK camera has an aerial-optimized f/2.8 wide-angle lens with a 24 mm equivalent focal length. It features eight elements — two aspherical — arranged in seven groups that fit into a smaller, more compact frame. Its images are consistently detailed with low distortion and low dispersion, ensuring that photos and videos are sharp and vivid.
Mechanical Shutter
Capturing objects moving at high speed can be a challenge for flying cameras using an electronic shutter. This is why the Phantom 4 RTK is the first DJI Phantom to use a mechanical shutter and a large-aperture prime lens. A maximum mechanical shutter speed of 1/2000-second eliminates motion blur and “jello effect” caused by shooting a fast-moving object with a rolling electronic shutter. The electronic shutter has also been improved with a max shutter speed of 1/8000-second, and a there is Burst Mode shoot capable of shooting 14 fps at 20 megapixels to catch the perfect moment.
Remote Controller with Lightbridge HD Video Link
The Phantom 4 Remote Controller integrates an upgraded Lightbridge HD video transmission system that adds 5.8 GHz transmission support. The ability to choose between 2.4 GHz and 5.8 GHz allows pilots to cut through interference and eliminates image lag caused when flying in an area with extensive 2.4 GHz frequency use. Normally, Wi-Fi video transmission systems use a 2.4 GHz frequency to work with a controller using a 5.8 GHz frequency, as this prevents interference that can occur when both use the same frequency.
Lightbridge HD Video Link
The Lightbridge HD video transmission system used in the Phantom 4 RTK uses TDM (Time Division Multiplexing) to transmit signals, allowing it to send controller signals and receive video transmission signals at the same frequency. As the 2.4 GHz frequency band is often affected by Wi-Fi, 4G cell towers, and other types of interference in urban areas, a 5.8 GHz band will increase transmission reliability. When switched on, the Phantom 4 evaluates local signal levels, automatically choosing the transmission frequency with the lowest level of interference. This enables a maximum video transmission range of 4.3 miles.
Intelligent Flight Modes
Draw
With Draw, simply draw a route on screen and the Phantom 4 RTK will move in that direction while keeping its altitude locked. This allows the pilot to focus on camera control and enables more complex shots. There are two Draw modes that can be used in different scenarios:
Standard: The aircraft follows the route at a constant speed with the camera facing in the direction of flight.
Free: The aircraft only moves along the route when instructed. In this mode, the camera can face in any direction during a flight.
ActiveTrack
Following fast-moving objects can be very challenging, but advanced image-recognition algorithms used by the Phantom 4 RTK allow it to recognize and track an object while keeping it in frame. This algorithm also recognizes a range of subjects, from people to vehicles to animals, and will adjust its flight dynamics to match, ensuring smoother shots. Pilots can now choose between:
Trace: Follow behind or in front of a subject, avoiding obstacles automatically.
Profile: Fly alongside a subject at a variety of angles to get profile shots of the subject.
Spotlight: Keep the camera trained on a subject while the aircraft flies almost anywhere.
TapFly
Fly in any direction visible on-screen with a simple tap. Tap anywhere on-screen to smoothly adjust the direction of flight while automatically avoiding obstacles and tap the screen again or use control sticks to change direction. An AR route function shows the aircraft’s real-time flight direction for reference as its route is adjusted. As it can be difficult to control altitude, course, speed, and camera pitch simultaneously using joysticks, TapFly Free allows a pilot to set the direction of flight, allowing them to turn the Phantom 4 RTK or tilt the gimbal as required without changing the direction of flight. In total, there are now three TapFly modes:
TapFly Forward: Tap to fly in the selected direction.
TapFly Backward: Tap to fly in the opposite direction of the tap, e.g. tap in the bottom right corner of the screen to fly backward towards the top left.
TapFly Free: Lock the forward direction of the Phantom without locking the camera direction allowing it to turn as it flies.
Note: Obstacle Avoidance is not available with TapFly Free.
Return to Home
In its Return to Home mode, the Phantom 4 RTK can automatically choose the best route to return home depending on environmental conditions. It records its route as it flies, allowing it to return along the same route and avoid obstacles if the control signal is disconnected.
Based on its altitude at the time of disconnection, the Phantom 4 RTK is also able to adjust its flight path to avoid obstacles it has seen during its flight. At takeoff, the Phantom 4 RTK will record the scene below and compare its recording with what it sees as it returns, for a more precise landing. It can also detect the ground to see whether there is a suitable spot for landing. If any obstacles are found, or if there is water on the ground, it will alert the pilot and hover at an appropriate height, helping the aircraft to land more safely.
Gesture Mode
With Gesture Mode, selfies can be captured using a few gestures without the remote controller. Computer vision technology allows the Phantom 4 RTK to take instructions through gestures. The subject simply lifts their arms when facing the camera and the aircraft will recognize this movement by locking on and placing the subject in the center of the frame. When ready for a photo, the subject holds their arms out to signal the aircraft. A three second countdown will begin, making time to strike a pose, allowing moments to be captured without the remote control.
Flight Control System
Flight Modes
Different productions require different flight characteristics, and the Phantom 4 RTK offers three modes for flight: P, A and S. Switching between them allows pilots to get the control they need, whether they seek smoothness, simplicity, intelligent navigation, or speed. In Position Mode (P), TapFly, ActiveTrack, obstacle sensing, and positioning features are available. Sport Mode (S) adds extra agility and higher speed, reaching 45 mph. Attitude Mode (A) switches off satellite stabilization and holds the Phantom 4 RTK’s altitude. It is ideal for experienced pilots looking to capture smoother footage. Tripod Mode, which limits speed to 4 mph provides precision control for fine framing and indoor flying. Both the infrared sensing system and vision sensors are enabled in these modes for a safer flight experience.
Sensor Redundancy
The Phantom 4 RTK features dual compass modules and dual IMU units, making it more reliable when compared to many hexacopters and octocopters. Compasses and IMUs are important sensors to ensure a stable flight and the Phantom 4 RTK constantly compares the data it receives through both pairs. This data is run through various algorithms to check accuracy, and any inaccurate data is simply discarded without affecting flight, keeping the flight steady and reliable.
Intelligent Battery System
Professional aerial imaging benefits from longer flight times. The Phantom 4 RTK features a maximum flight time of 30 minutes, providing more time in the air to capture the perfect shot. The DJI GO app shows battery lifetime and calculates remaining flight times according to distance traveled and more. It will give alerts when it reaches a minimum safe amount required for a safe journey back to the takeoff point. An advanced battery management system is also in place to prevent overcharging and over draining. When placed in longer-term storage, batteries will discharge power to maintain good health.
In the Box
DJI Phantom 4 RTK Quadcopter with D-RTK 2 GNSS Mobile Station Combo
D-RTK 2 GNSS Mobile Station for Phantom 4 RTK Drones
Carrying Case
Remote Controller with HD Display
16GB MicroSD Card
4 x Pair of Propeller Blades
2 x Intelligent Flight Batteries
Remote Controller Intelligent Battery
Intelligent Battery Charging Hub
Intelligent Flight Battery Charging Hub
Gimbal Clamp
AC Power Cable
AC Power Adapter
Micro-USB Cable
USB Type-C Cable
USB Type-C OTG Cable
2 x Philips Screws
Limited 1-Year Warranty (MC and Controller Charging Hub)
Limited 6-Month Warranty (Gimbal Camera, Vision/Propulsion Systems, Controller, and Batteries/Charger)
How does the Phantom 4 RTK differ from previous Phantom Series products?
While previous Phantom Series drones were built around professional photographers and hobbyists, the Phantom 4 RTK was designed for industrial users for high-precision mapping and other data acquisition missions. While the Phantom 4 RTK shares a similar camera and form size, it also adds a RTK positioning module, a new TimeSync system, a purpose-built mapping app and more.
What propellers does the Phantom 4 RTK use?
The Phantom 4 RTK uses the same 9455s Quick Release Propellers as the Phantom 4 Pro.
Can I fly the Phantom 4 RTK in other countries or regions?
No, the Phantom 4 RTK has specific versions for different countries and/or regions. Users can check the version code on the product packaging or through the GS RTK app (go to Aircraft Information -> Firmware).
Camera
What is the difference between the Phantom 4 RTK’s camera and the camera on the Phantom 4 Advanced/Pro?
While the Phantom 4 RTK and Phantom 4 Pro/Advanced share the same 1-inch, 20 megapixel CMOS sensor, the Phantom 4 RTK has improved the capabilities of the camera for mapping through a new lens distortion recording process. Each Phantom 4 RTK camera goes through a calibration process that measures the distortions of the lens, and records the corresponding undistort parameters. The camera allows users to output the original images without distortion correction as well as the undistort parameters in the XMP file for post-processing
Can the ND filter of the Phantom 4 Pro be used on the Phantom 4 RTK?
Yes, the ND filters made for the Phantom 4 Pro can also be used for the Phantom 4 RTK.
Does the Phantom 4 RTK camera digital signal processor (DSP) support distortion correction?
No, you can enable the distortion correction in the camera but the images will be less precise compared to distortion elimination in post-processing software.
How is the Phantom 4 RTK camera calibrated?
Each Phantom 4 RTK camera goes through a calibration process that measures the distortions of the lens, and records the corresponding undistort parameters in XMP DewarpData. When the “distortion correction” is switched off, the original image with distortion will be generated. When the “distortion correction” is switched on, the parameters used to eliminate distortion is not the parameters calibrated, but the design parameters of the camera. When eliminating the distortions, it is not done pixel by pixel.
Remote Controller
What are the highlight features for the standard remote controller of the Phantom 4 RTK?
Built-in 5.5-inch display, 1080P, up to 1000 nits brightness. You can see the screen in strong sunlight. The controller can work in low temperatures.
Supports hot swappable batteries.
Pre-installed GS RTK App can run Photogrammetry, Waypoint and other mission types.
OcuSync video transmission.
How can I switch between FCC and CE modes?
FCC and CE mode switching is not available.
Can I connect the Phantom 4 RTK to other Phantom series controllers?
No.
Video Transmission
What is the video transmission distance of the Phantom 4 RTK?
The effective video transmission distance depends on your method of operation (such as the antenna position) and actual flight environment. In an open and unobscured environment, the maximum distance is 7 km when FCC compliant, and 5 km when CE compliant. (2.4 GHz).
What should I do if the app sends me the following notification: “the remote controller signal is weak, please adjust the antenna”?
This means that improper antenna positioning is likely affecting the video transmission signal, and therefore the quality of the real-time view. You can try to adjust the antennas so the flat sides of the antenna point towards the Phantom 4 RTK.
Can I continue my automated mapping mission if the Phantom 4 RTK loses video transmission signal during its mission?
Yes, if the video transmission signal is lost, you can reconnect and continue the mapping mission.
Battery
Can I use my Phantom 4 Pro batteries with the Phantom 4 RTK and vice versa?
Yes, the Phantom 4 RTK and Pro batteries are cross compatible and have the same capacity, meaning flight time won’t be effected.
How long does it take to fully charge a Phantom 4 RTK battery?
It takes roughly 60 minutes to fully charge a Phantom 4 RTK battery.
How should I take care and store my batteries?
Batteries should be stored in a dry, ventilated, cool environment, away from fire, high temperature and flammable materials.Do not put the battery in an environment that may cause the battery temperature to rise, such as in the sun, or under the direct sunlight inside your car.Long-term storage should ensure that the amount of electricity is more than 50% but not fully charged. The battery should be charged and discharged to maintain the battery activity every 3 month for long-term storage.
What does it mean when the battery icon turns yellow in the app?
This means the voltage of the battery cell is low and should be charged soon. Please be cautious when flying under this situation.
Can I use Phantom 4 RTK batteries in low temperatures?
The battery capacity (and therefore flight time) will sharply decrease in low temperatures (< -10℃/14℉). It is recommended to heat the batteries to 20℃/68℉ before flying to limit this effect. For flight safety, the battery cannot be charged when the temperature is below 5℃/41℉ or above 40℃/104℉.
Why do batteries start to heat up after long-term storage?
This is a normal phenomenon. When batteries have been stored for a long time with over 65% of the charge remaining, an automatic discharging procedure is activated to decrease battery level to 65%, during which the batteries will heat up.
Position and Orientation
What options do I have to reference the positioning data from the Phantom 4 RTK?
Connect locally via OcuSync to your D-RTK 2 Mobile Station. (RTCM3.2)
Connect remotely via a 4G Dongle to a custom RTK network using a NTRIP account.(RTCM3.2)
Connect remotely via a WiFi hotspot to a custom RTK network using a NTRIP account. Not available in Europe.(RTCM3.0/RTCM3.1/RTCM3.2)
What positioning accuracy can the Phantom 4 RTK achieve?
The Phantom 4 RTK can achieve 1 cm+1 ppm (horizontal), 1.5 cm + 1 ppm (vertical) accurate data.
What is TimeSync and how does it ensure the positioning accuracy of each image taken on the Phantom 4 RTK?
TimeSync continually aligns the flight controller, camera and RTK module, then adjusts the positioning data to the center of the CMOS and records the data in EXIF and XMP format.
What are the differences between PPK and RTK mode? How to use them?
RTK and PPK are two different kinematics technologies that reference data in different ways. RTK and PPK both achieve centimeter-level precision. RTK is recommended for users flying in environments that allow for real-time connection via OcuSync or 4G and prefer convenience and efficiency. For users who have no demand on timeliness and/or need to operate in conditions without connectivity, PPK is a better option.
Which PPK file types does the Phantom 4 RTK support? What are these files for and how do I use them?
EVENTLOG.bin is a binary format that stores exposure, time stamp and log file.
PPKRAW.bin is an RTCM3.2 MSM5 format that stores satellite observation data and ephemeris data.
Rinex.obs is a Rinex file format that is created after transcoding.
Timestamps.MRK is a ASCII format that stores exposure and time stamp.
How do I find the XMP information of my Phantom 4 RTK photos?
Open the photo in text format and search “XMP” to find this information on each photo.
When I take a photo with the Phantom 4 RTK, where is the location metadata logging the position from?
Due to the new TimeSync system, each photo stores the position of the CMOS center in its metadata.
How can I get the compensation value between the antenna phase center and CMOS center?
For each photo, the compensation value between the RTK module’s antenna phase center and the CMOS center in NED coordinate system is recorded in the timestamp, which can be found in the Timestamp.MRK file under the “survey” folder.
What are the methods of calculation used by the Cloud PPK Service?
There are 2 ways that Cloud PPK Service uses to calculate PPK data: DJI base station and RINEX base station.
DJI Base Station: Connect DJI D-RTK 2 High-Precision GNSS Mobile Station and the remote controller via a USB cable to upload the PPK data onto the base station. After the server acquires the data from the aircraft and the D-RTK 2 Mobile Station, it will start PPK calculation automatically.
RINEX Base Station: Convert the satellite observation values received by third-party base stations into standard RINEX format, then import the PPK source data to the remote controller and upload them to the cloud server for PPK calculation.
In which SD cade file folder should the third-party satellite observation data be stored when I use a RINEX base station for PPK calculation? Where will the PPK calculation results be stored?
You should save the third-party satellite observation data under sd card/third_base/ on the SD card in the remote controller. The PPK results will be stored under SD card/DCIM/SURVEY/(mission file name)/result.csv.
How does the Cloud PPK Service acquire the geographic coordinate information of third-party base stations when using a RINEX base station for PPK calculation?
If the RINEX file contains a field “APPROX POSITION XYZ”, which includes the approximate location of the base station in the ECEF coordinate system, the Cloud PPK Service will be able to analyze the location based on information in the field and convert it into geographic coordinates. These coordinates will be set as the default coordinates for the phase center of the antenna of the base station.
Users can also manually enter the longitude and latitude information of where the base station is set up, as well as the distance between the bottom of the base station and the antenna phase center (APC). With this information, the Cloud PPK Service will run calculations based on the antenna phase center information entered by the user.
The Cloud PPK Service can also acquire the location of the antenna phase center through Single Point Positioning (SPP) with RINEX data. These coordinates will be used for PPK calculation.
Where is Cloud PPK Service available?
The service is available everywhere except in the US, Canada, Hong Kong SAR, and Macau SAR.
When I use the D-RTK 2 Mobile Station as an RTK rover, where are the coordinate files stored?
You can find them under /DJI/EXPORT/RTK_SCOUT.
How does the RTK rover measure data?
There are two ways:
Instantaneous measurement
Average measurement using 10 values collected during 2 seconds
Does the D-RTK 2 Mobile Station have to have an RTK “FIX” to be used as a rover?
For instantaneous measurement: yes, it has to be “FIX”.
For average measurement: it is recommended that the RTK signal be “FIX”.
How do I run firmware updates on the D-RTK 2 Mobile Station?
Currently you can only update it via the Phantom 4 RTK Remote Controller (not the SDK Remote Controller).
What is the “RTK positioning precision maintenance” mode?
When the RTK positioning precision maintenance mode is enabled, and if signals are lost from the RTK base station, positioning precision will decrease slowly from the absolute precision of 1 cm+1 ppm to around 20 cm. The RTK Flag value in the XMP data of the image will be 16, and the RTK status of the remote controller will remain at FIX.
Software
How do I update the Phantom 4 RTK firmware?
The Phantom 4 RTK firmware upgrade process is similar to that of the Phantom 4 Pro. Using the DJI Assistant 2 software, you can update the remote controller and aircraft firmware separately .
You can also update the drone and remote controller simultaneously through the GS RTK app. First you connect the remote controller to the aircraft with OTG and USB cables, then follow the procedures explained in the remote controller’s GS RTK app.
In what situations are the left/right TOF and infrared sensors active?
Currently the left/right TOF and infrared sensors are not active, so please fly with caution.
Which software programs can I use to control my Phantom 4 RTK and plan flights?
You can use the GS RTK app for flight control and plannng, and PC-based mapping software such as DJI Terra for mapping missions. If you purchase the SDK Remote Controller, you can also use DJI GS Pro, DJI Pilot, and a variety of third-party apps developed using DJI’ MSDK.
What mapping platform is being used to provide map data to the Phantom 4 RTK app?
Mapbox is used to provide map data to the GS RTK app.
What are the limitations to the Phantom 4 RTK’s waypoints?
In the GS RTK App: maximum waypoints: 199.
In DJI Terra: waypoints can be at most 2km apart, and at most 99 waypoints can be set. The total distance of a waypoint mission cannot exceed 40km, in photogrammetry mode the max distance is 100km.
Can I set waypoints by entering longitude and latitude values when using Waypoint mode?
No.
When importing KML area files into software programs, what is the maximum number of boundary points that I can set?
Currently the GS RTK app supports up to 199 boundary points, and DJI Terra supports up to 99.
Into which missions can I import KML files?
Photogrammetry 2D, Photogrammetry 3D (Double Grid), Photogrammetry 3D (Multi-oriented), Block Segmentation, and Terrain Awareness Mode missions.
In Terrain Awareness Mode, is there a way to turn off the Terrain Rendering Map display?
Yes. Tap the ··· on the upper right corner in Terrain Awareness Mode, and tap the ··· on the sidebar, you can turn off the display there under General Settings.
When would I use Block Segmentation?
Block Segmentation breaks large areas into multiple sets of flight paths, which will help improve efficiency. It is recommended to plan these flights over generally flat areas with little change in elevation for the best results.
How do I plan flight missions with Block Segmentation?
Select Block Segmentation;
Set the mapping area: manually set the mapping area or import kml files;
Adjust the grid size and direction;
Adjust parameters such as camera parameters and overlap rate.
In Block Segmentation, are the flight paths planned separately for each divided region or altogether?
The flight paths are planned altogether for all regions. Users cannot adjust the overlap rate, height, route direction, and other parameters for each area individually.
How do I control multiple aircraft simultaneously when executing Block Segmentation missions?
After you finish planning, bind each Phantom 4 RTK with corresponding flight mission. Then, you can start one of the missions by itself or start all missions simultaneously.
How many Phantom 4 RTK can I control at the same time while using the Block Segmentation?
At most 5.
If I operate several aircraft at the same time, is it possible that they crash into each other?
No. Thanks to the obstacle sensing technology, when two or more Phantom 4 RTK get close to each other, they will slow down or hover automatically. They will only resume the mission when the area is cleared.
Can I fly a mission with Phantom 4 RTK using Absolute Altitude?
Yes, but only for Waypoint Flight.
How do I fly a mission with Phantom 4 RTK using Absolute Altitude?
Enter RTK Settings and confirm the RTK status is FIX;
Select Waypoint Flight, start adding waypoints with RTK enabled, the system will automatically record the absolute altitude of each waypoint;
Select Absolute Altitude in the Height popup window when you perform the operation.
Can I fly a mission using Absolute Altitude if RTK is not enabled or if RTK is not “FIX” on the Phantom 4 RTK?
No. You can only fly using the default Relative Altitude mode without RTK or if RTK is not “FIX”.
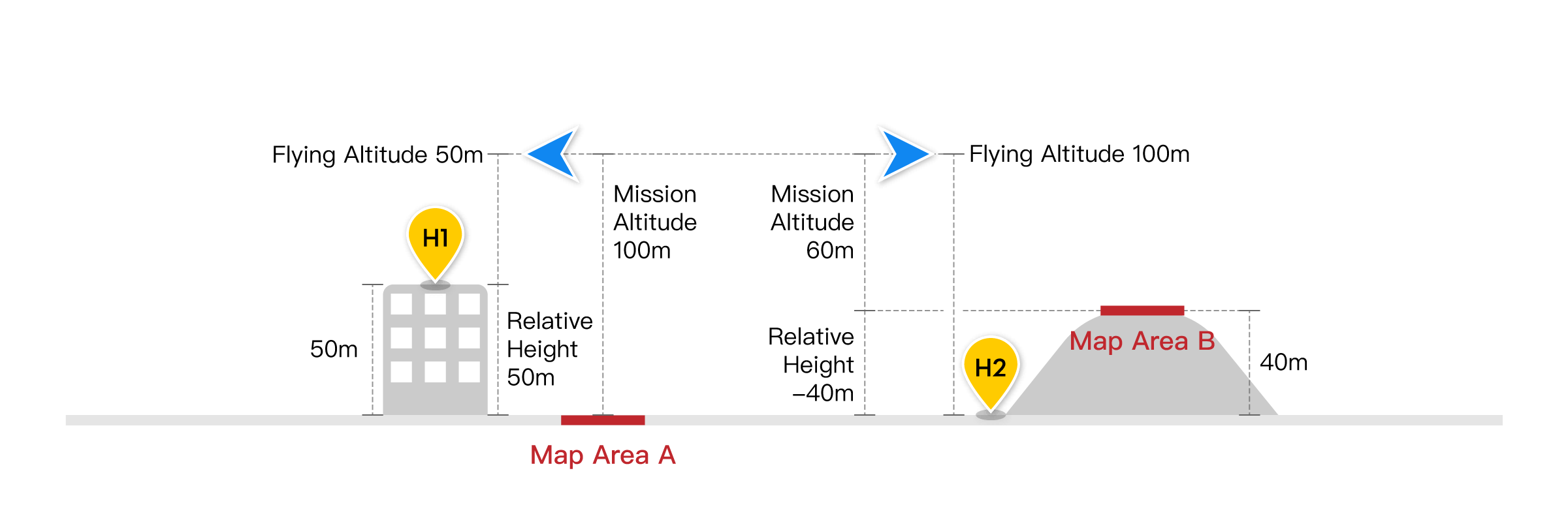
When do I need to adjust Relative Height?
When the elevation of the takeoff location is different from the elevation of the area being mapped, you can adjust the Relative Height to ensure sufficient overlap rates in the measurement. Please see the attached illustration:
If the drone takes off from a 50m building marked H1 in the illustration, the area being mapped is marked A, and the expected altitude for aerial data collection is 100m, you can set the Mission Altitude in to 100m, and Relative Height to 50m. Similarly, if the drone takes off from H2 to map Area B, which is a hill with an elevation of 40m, and the expected altitude for aerial data collection is 60m, then set Mission Altitude to be 60m, and Relative Height to be -40m. You can adjust Relative Height in Photogrammetry 2D, Photogrammetry 3D (Double Grid), Photogrammetry 3D (Multi-oriented), Linear Flight Mission, and Block Segmentation missions.
the Relative Height
In what scenarios can variable altitude flight path missions be used?
Variable altitude flight paths are useful for taking modeling shots at belts of terrain with great altitude differences, for instance, power transmission lines, roads and rivers with rising and falling topography.
Are there any altitude and angle restrictions between waypoints when planning a variable altitude flight path?
There are no altitude restrictions between any two waypoints. The actual flight altitude is determined by the altitude limit. There are no angle restrictions.
Does a variable altitude flight path mission support imported KML files? What are the requirements for KML files?
Yes. Click on the “KML” icon on the functions menu to select the file. The KML file type must be linear, and the format of the field for absolute altitude in the KML file must be “absolute”.
What is “mission altitude” in a variable altitude flight path mission?
It is the distance between the flight plane and the plane between Points A, B and C.
Can a flight path be executed in reverse sequence in a variable altitude flight path mission?
Yes a flight path can be executed in reverse sequence. After a flight path has been generated from recorded waypoints, click on the reverse sequence button at the bottom of the interface to reverse the waypoint flight sequence.
In what scenarios can sloping flight paths be used?
They are useful for scenarios involving model elements such as hillsides and building facades. Sloping flight path planning generates flight paths automatically for a sloping surface or facade, and successfully collects the photogrammetric data.
What is the function of the plan view of the flight path when executing a sloping flight path mission?
During a sloping flight path mission, the app interface will display a image transmission window, a map view window and a plan view window. The plan view window is at the bottom-right corner of the interface. During a mission, it is able to display the flight path from a perspective that is vertical to the plane, so as to assist in determining the area to be mapped and positioning the aircraft.
What are “mission distance” and “mission altitude” in a sloping flight path mission?
“Mission distance” and “mission altitude” are both used to adjust the distance between the flight plane and the plane between Points A, B and C. If the slope is steep or completely vertical, you can select the mode of being perpendicular to the target plane, and adjust the distance between the flight plane and the plane between Points A, B and C by setting the “mission distance”; if the slope is relatively flat, you can use the mode of being perpendicular to the horizontal plane, and adjust the distance between the flight plane and the plane between Points A, B and C by setting the “mission altitude.”
How do I ensure flight safety when planning a sloping flight path?
When planning the waypoints for a flight path over the sloping plane between Points A, B and C, pay attention to the area to be mapped based on the default expanded distance from Point C, and ensure there are no flight safety hazards within the default expanded area.
Mapping
What formats of differential data does the Phantom 4 RTK support?
Currently the Phantom 4 RTK supports RTCM 3.0 data, RTCM 3.1 data, MSM4,MSM5, MSM6 and MSM7 data under RTCM3.2.
Are the coordinates measured by the Phantom 4 RTK relative coordinates or absolute coordinates?
The coordinates measured by the Phantom 4 RTK are absolute coordinates under WGS84.
How do I calculate an appropriate flight altitude based on a GSD value?
You can refer to the equation H=36.5*GSD to estimate an appropriate flight altitude. Please note that GSD ground sampling distance in this equation is measured by centimeters, while H (Height or flight altitude) is measured by meters. For example, GSD=2.74 cm, when altitude=100 m.
Do images captured by the Phantom 4 RTK store altitude any information? If so, how is this data stored?
Elevation and relative altitude (relative to your takeoff point) are stored in photos captured by the Phantom 4 RTK. Absolute altitude can be used for mapping, and relative altitude can be found in the XMP file.
How can I capture oblique photography when using the Phantom 4 RTK?
Oblique imagery can be captured while flying in the Photogrammetry mode on the GS RTK app. In the Photogrammetry mode, you can adjust gimbal angle from -90 °to -45° under Camera Settings for your flight plan.You can only set one gimbal angle value at a time, so for sites where you want to capture multiple angles you can plan the same mission and just adjust the camera angle.
Can I create a 3D model or point cloud with third-party software using the images captured by the Phantom 4 RTK? If yes, what is the accuracy of the model created?
Yes, you can use third-party software to process Phantom 4 RTK image data and create models, however the accuracy will vary based on the photogrammetric algorithm used. Please refer to the third-party software provider for more information on expected accuracy.
When there are no Ground Control Points (GCPs), what is the accuracy of the model that the Phantom 4 RTK data can make? Can the accuracy meet the requirements of 1:500 scale aerial triangulation?
The orthoimages created with the images captured by the Phanton 4 RTK and select reconstruction software have shown an absolute accuracy of roughly 5 cm, while the accuracy required in 1:500 scale aerial triangulation is less than 30 cm. This means the Phantom 4 RTK’s accuracy meets the requirements of 1:500 scale aerial maps.
Is the Phantom 4 RTK compatible with third-party base stations?
No, you cannot connect third-party base stations to the Phantom 4 RTK or the remote controller via a radio station. However, you can obtain data from a network RTK server via Ntrip protocol in 4G/Wi-Fi network environment. Satellite observation data can also be saved in the aircraft for users to conduct post processed kinematics (PPK) to complete their tasks.
When I collect orthoimages with the Phantom 4 RTK, what may cause inaccuracies in elevation?
Possible causes include:
The GCP is set in a different coordinate system or height datum from that of the Phantom 4 RTK’s position. Please make sure they are in the same coordinate system.
The Phantom 4 RTK’s RTK status is not “FIX”. Ensure that the RTK status is “FIX” when collecting data.
The internal camera parameters used by the post processing software are not accurate.
If the internal camera parameters used by post-processing modeling software are inaccurate, resulting in an inaccurate altitude, how can altitude precision be improved when collecting orthophotographic data using a Phantom 4 RTK?
“Altitude Optimization” is already set by default in the parameter settings for the “2D Photogrammetry” and “Block Segmentation” planning modes. After this function is enabled, the Phantom 4 RTK will return to the center of the mapped area after completing the flight path, and gather images of the sloping features to improve altitude precision. This function is only applicable to the “2D Photogrammetry” and “Block Segmentation” planning modes.
Based on 0 reviews
0.0 overall
0
0
0
0
0
Be the first to review “DJI Phantom 4 RTK Quadcopter with D-RTK 2 GNSS Mobile Station Combo”
The all-weather, multi-sensor flagship Zenmuse H30 Series integrates five major modules—a wide-angle camera, a zoom camera, an infrared thermal camera, a laser range finder, and an NIR auxiliary light. Employing cutting-edge intelligent algorithms, it revolutionizes perception and imaging standards, transcending the limitations of day and night vision. This makes it effortlessly suitable for a variety of operations, including public safety, energy inspection, water conservation, and forestry.
The all-weather, multi-sensor flagship Zenmuse H30 Series integrates five major modules—a wide-angle camera, a zoom camera, an infrared thermal camera, a laser range finder, and an NIR auxiliary light. Employing cutting-edge intelligent algorithms, it revolutionizes perception and imaging standards, transcending the limitations of day and night vision. This makes it effortlessly suitable for a variety of operations, including public safety, energy inspection, water conservation, and forestry.
This website uses cookies so that we can provide you with the best user experience possible. Cookie information is stored in your browser and performs functions such as recognising you when you return to our website and helping our team to understand which sections of the website you find most interesting and useful.
Strictly Necessary Cookies
Strictly Necessary Cookie should be enabled at all times so that we can save your preferences for cookie settings.
If you disable this cookie, we will not be able to save your preferences. This means that every time you visit this website you will need to enable or disable cookies again.
3rd Party Cookies
This website uses Google Analytics to collect anonymous information such as the number of visitors to the site, and the most popular pages.
Keeping this cookie enabled helps us to improve our website.
Please enable Strictly Necessary Cookies first so that we can save your preferences!
Additional Cookies
This website uses the following additional cookies:
(List the cookies that you are using on the website here.)
Please enable Strictly Necessary Cookies first so that we can save your preferences!








There are no reviews yet.